聯(lián)系方式 | 手機(jī)瀏覽 | 收藏該頁 | 網(wǎng)站首頁 歡迎光臨甘茨軟件科技(上海)有限公司

甘茨軟件科技(上海)有限公司 甘茨軟件|創(chuàng)紫集團(tuán)||
13187016380









2026-03-20 05:09:38
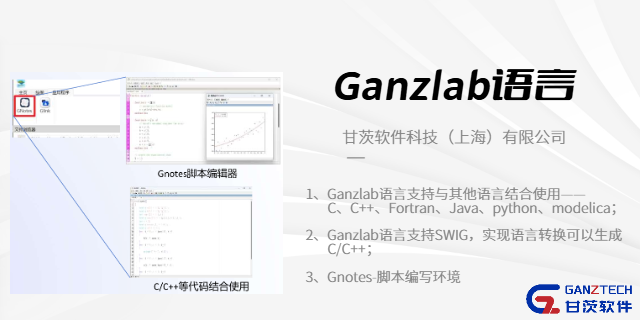
電子與通信領(lǐng)域MBD是將復(fù)雜系統(tǒng)功能需求轉(zhuǎn)化為可執(zhí)行模型的開發(fā)方法,貫穿從算法設(shè)計到代碼實(shí)現(xiàn)的全流程。在集成電路設(shè)計中,MBD支持?jǐn)?shù)字信號處理(DSP)算法的圖形化建模,工程師可通過搭建濾波器、調(diào)制解調(diào)器等模塊,模擬5G基帶信號的處理過程,精確計算信噪比、誤碼率等關(guān)鍵指標(biāo),優(yōu)化算法性能。通訊設(shè)備嵌入式軟件開發(fā)中,MBD能將設(shè)備控制邏輯(如射頻模塊功率調(diào)節(jié)、信道切換)轉(zhuǎn)化為狀態(tài)機(jī)模型,通過仿真驗(yàn)證不同輸入信號對應(yīng)的執(zhí)行動作,確保控制邏輯的完整性。針對通訊網(wǎng)絡(luò)協(xié)議開發(fā),MBD可構(gòu)建協(xié)議棧的分層模型,模擬物理層、數(shù)據(jù)鏈路層、網(wǎng)絡(luò)層的交互過程,分析協(xié)議開銷對傳輸效率的影響,為協(xié)議優(yōu)化提供量化依據(jù)。該方法支持模型與代碼的自動轉(zhuǎn)換,能生成符合嵌入式系統(tǒng)要求的高效代碼,同時通過模型在環(huán)、軟件在環(huán)等多階段驗(yàn)證,確保電子與通信系統(tǒng)的功能正確性與性能指標(biāo)達(dá)標(biāo)。汽車控制器軟件MBD好用的軟件,需支持圖形化建模與自動代碼生成,適配多類控制器開發(fā)。上海自動駕駛MBD優(yōu)勢有哪些
科研領(lǐng)域信號處理可視化建模MBD將復(fù)雜的信號處理算法轉(zhuǎn)化為圖形化模型,實(shí)現(xiàn)對各類物理信號(如振動信號、生物電信號)的分析與處理過程的可視化仿真。在機(jī)械故障診斷研究中,可構(gòu)建振動信號的采集、濾波、特征提取模型,通過圖形化模塊展示傅里葉變換、小波分析等信號處理過程,直觀呈現(xiàn)不同故障狀態(tài)下的信號特征頻譜,為故障識別算法的研究提供可視化的驗(yàn)證平臺。針對生物醫(yī)學(xué)工程研究,建模能實(shí)現(xiàn)心電圖(ECG)、腦電波(EEG)等生物電信號的預(yù)處理與特征分析,模擬噪聲抑制、基線校正等處理環(huán)節(jié),量化分析不同處理算法對信號質(zhì)量的改善效果。MBD工具提供豐富的信號處理模塊庫與可視化繪圖功能,科研人員可通過拖拽模塊快速搭建信號處理流程,調(diào)整算法參數(shù)并實(shí)時觀察處理結(jié)果的變化,加速信號處理算法的迭代優(yōu)化,同時可視化的模型便于科研成果的展示與交流,提升研究效率。上海汽車系統(tǒng)建模國產(chǎn)平臺仿真驗(yàn)證系統(tǒng)進(jìn)行建模時,可將抽象邏輯轉(zhuǎn)化為可執(zhí)行模型,通過多場景仿真來確保系統(tǒng)可靠運(yùn)行。
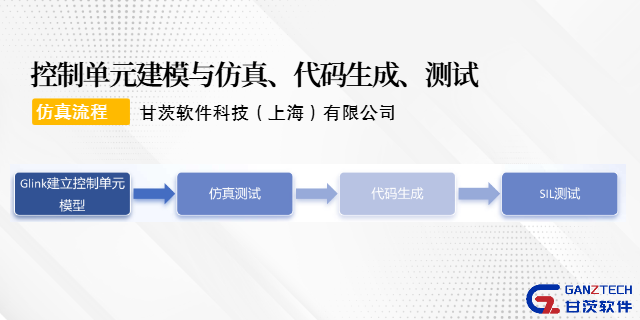
應(yīng)用層軟件開發(fā)系統(tǒng)建模是將軟件功能需求轉(zhuǎn)化為可執(zhí)行模型的過程,為復(fù)雜系統(tǒng)開發(fā)提供結(jié)構(gòu)化框架。在汽車電子應(yīng)用層開發(fā)中,針對車身電子控制模塊,建模需明確燈光控制、門窗調(diào)節(jié)等功能的狀態(tài)轉(zhuǎn)換邏輯,通過狀態(tài)機(jī)模型定義不同輸入信號(如遙控指令、車內(nèi)按鍵)對應(yīng)的執(zhí)行動作,確保功能邏輯的完整性。發(fā)動機(jī)控制器應(yīng)用層建模則需整合傳感器信號處理、執(zhí)行器驅(qū)動邏輯,將空燃比控制、怠速調(diào)節(jié)等算法轉(zhuǎn)化為模塊化模型,各模塊通過清晰的接口傳遞數(shù)據(jù),便于團(tuán)隊(duì)協(xié)作開發(fā)。建模過程需考慮軟件的可擴(kuò)展性,采用標(biāo)準(zhǔn)化的模型架構(gòu),使新增功能(如自適應(yīng)巡航輔助)能快速集成到現(xiàn)有模型中。通過系統(tǒng)建模,可在開發(fā)早期梳理功能邊界與交互關(guān)系,減少后期集成階段的接口矛盾,同時為自動代碼生成提供可靠的模型基礎(chǔ),提升應(yīng)用層軟件的開發(fā)效率與質(zhì)量。
汽車電子應(yīng)用層軟件開發(fā)中的系統(tǒng)建模,是將抽象的功能需求轉(zhuǎn)化為可操作模型的關(guān)鍵步驟,為團(tuán)隊(duì)協(xié)作與高效開發(fā)提供支撐。在車身控制器開發(fā)中,建模需圍繞燈光、門鎖等控制功能展開,通過狀態(tài)機(jī)模型清晰定義各功能的觸發(fā)條件與執(zhí)行路徑,比如遙控鑰匙解鎖時,模型能明確門鎖電機(jī)的轉(zhuǎn)動時長、轉(zhuǎn)向燈的閃爍邏輯,確保功能實(shí)現(xiàn)無遺漏。發(fā)動機(jī)控制器ECU的應(yīng)用層建模,需將空氣流量傳感器信號處理、噴油器驅(qū)動等功能拆分為單獨(dú)模塊,每個模塊都有標(biāo)準(zhǔn)化的輸入輸出接口,方便不同工程師同步開發(fā),減少溝通成本。建模時還要充分考慮擴(kuò)展性,采用統(tǒng)一的模型架構(gòu)設(shè)計,當(dāng)需要增加自適應(yīng)巡航、智能啟停等新功能時,只需開發(fā)對應(yīng)子模塊并接入現(xiàn)有模型,無需重構(gòu)整體框架。這種建模方式能在開發(fā)初期就梳理清楚各功能的邊界與交互關(guān)系,避免后期集成時出現(xiàn)接口不匹配問題,同時為自動代碼生成提供合格的模型源,有效提升應(yīng)用層軟件的開發(fā)效率與可靠性。汽車控制器軟件采用基于模型設(shè)計,能可視化復(fù)雜邏輯,覆蓋需求到代碼生成全流程。
車載通信領(lǐng)域的基于模型設(shè)計(MBD),只要選對工具和服務(wù)模式,能滿足中小企業(yè)的研發(fā)需求,同時兼顧成本與效率。中小企業(yè)可以選擇輕量化的MBD工具,這類工具專門聚焦CAN/LIN總線等主流車載通信協(xié)議的建模功能,并且大多采用模塊化授權(quán)的方式,企業(yè)只需按需購買總線調(diào)度仿真、信號解析等模塊,能有效降低初期投入。對于技術(shù)積累不足的團(tuán)隊(duì)來說,市面上部分服務(wù)商提供現(xiàn)成的標(biāo)準(zhǔn)化通信模型模板,像車身電子通信模塊這樣的模板,企業(yè)拿來后只需根據(jù)自身產(chǎn)品調(diào)整參數(shù),就能大幅減少建模的工作量。MBD的早期仿真能力對中小企業(yè)尤為重要,能在采購硬件設(shè)備前就發(fā)現(xiàn)通信邏輯中的問題,減少物理測試的次數(shù)和成本,比如通過仿真優(yōu)化CAN總線的負(fù)載率,就能避免車輛行駛中因通信擁堵引發(fā)的功能故障。工業(yè)控制系統(tǒng)建模MBD,以模型串聯(lián)控制邏輯設(shè)計與仿真,可提前發(fā)現(xiàn)問題,讓系統(tǒng)運(yùn)行更穩(wěn)定。上海汽車系統(tǒng)建模國產(chǎn)平臺
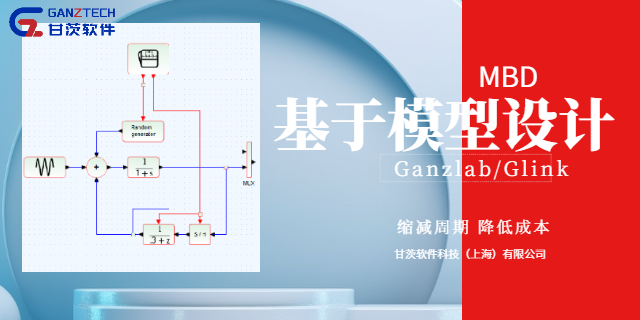
基于模型設(shè)計的整車仿真開發(fā)成本更低,可反復(fù)仿真優(yōu)化,減少實(shí)物樣件修改,從而節(jié)約成本。上海自動駕駛MBD優(yōu)勢有哪些
車載通信系統(tǒng)建模旨在通過數(shù)字化手段驗(yàn)證車內(nèi)網(wǎng)絡(luò)的通信邏輯與可靠性,適配CAN/LIN總線、車載以太網(wǎng)等不同通信場景的需求。CAN總線作為車內(nèi)關(guān)鍵信號傳輸?shù)妮d體,建模時需詳細(xì)定義各節(jié)點(diǎn)的報文屬性,包括ID優(yōu)先級、數(shù)據(jù)長度和發(fā)送周期,再通過總線調(diào)度模型仿真發(fā)動機(jī)ECU、ABS控制器等節(jié)點(diǎn)的報文傳輸過程,計算總線的負(fù)載情況,避免因負(fù)載過高導(dǎo)致制動信號、轉(zhuǎn)向信號等關(guān)鍵數(shù)據(jù)延遲。LIN總線建模針對車窗、雨刮等低速控制場景,重點(diǎn)模擬主節(jié)點(diǎn)與從節(jié)點(diǎn)的通信握手過程,測試控制指令的傳輸延遲,防止因延遲造成車窗升降卡頓等問題。隨著自動駕駛技術(shù)發(fā)展,車載以太網(wǎng)的建模需求日益凸顯,需構(gòu)建符合以太網(wǎng)協(xié)議的通信模型,仿真激光雷達(dá)、高清攝像頭的海量數(shù)據(jù)傳輸,分析網(wǎng)絡(luò)擁堵時的數(shù)據(jù)丟包情況,優(yōu)化傳輸策略。建模過程中還要融入線束阻抗、電磁干擾等硬件特性,模擬極端工況下的通信表現(xiàn),驗(yàn)證系統(tǒng)的容錯能力,保障車內(nèi)通信的穩(wěn)定與**。上海自動駕駛MBD優(yōu)勢有哪些